Roboticist.
Engineer.
Ph.D. Candidate at Carnegie Mellon building robots that move intelligently: from centimeter-scale walkers to lunar rovers.
 📸 Chad Isaiah Studios
📸 Chad Isaiah Studios
Scroll
Ph.D. Candidate at Carnegie Mellon building robots that move intelligently: from centimeter-scale walkers to lunar rovers.
📸 Chad Isaiah Studios
I'm a third-year Ph.D. candidate in Mechanical Engineering at Carnegie Mellon, working in the Robomechanics Lab on design optimization, legged locomotion, and bipedal dynamics across length scales.
I earned my B.S.E. from Princeton University in Mechanical & Aerospace Engineering with a certificate in Robotics & Intelligent Systems. My research spans hip-actuated walkers, penguin-inspired bipeds, and allometric scaling laws for robotic locomotion.
When I'm not deep in CAD models, I enjoy creative writing, hand-drawn 2D animation, learning new languages (French, Japanese, Yoruba), hiking, and photography.



From lunar rovers to Starship, contributing to systems that push the boundaries of engineering.
Leading research on hip-actuated bipedal walkers and allometric scaling laws. Created digital twins in Drake and MuJoCo. Designed a penguin-inspired bipedal robot from CAD to hardware with open-loop and PPO-based control. Mentoring multiple undergraduate and graduate students. Leading STEM outreach events throughout Pittsburgh, PA, USA.
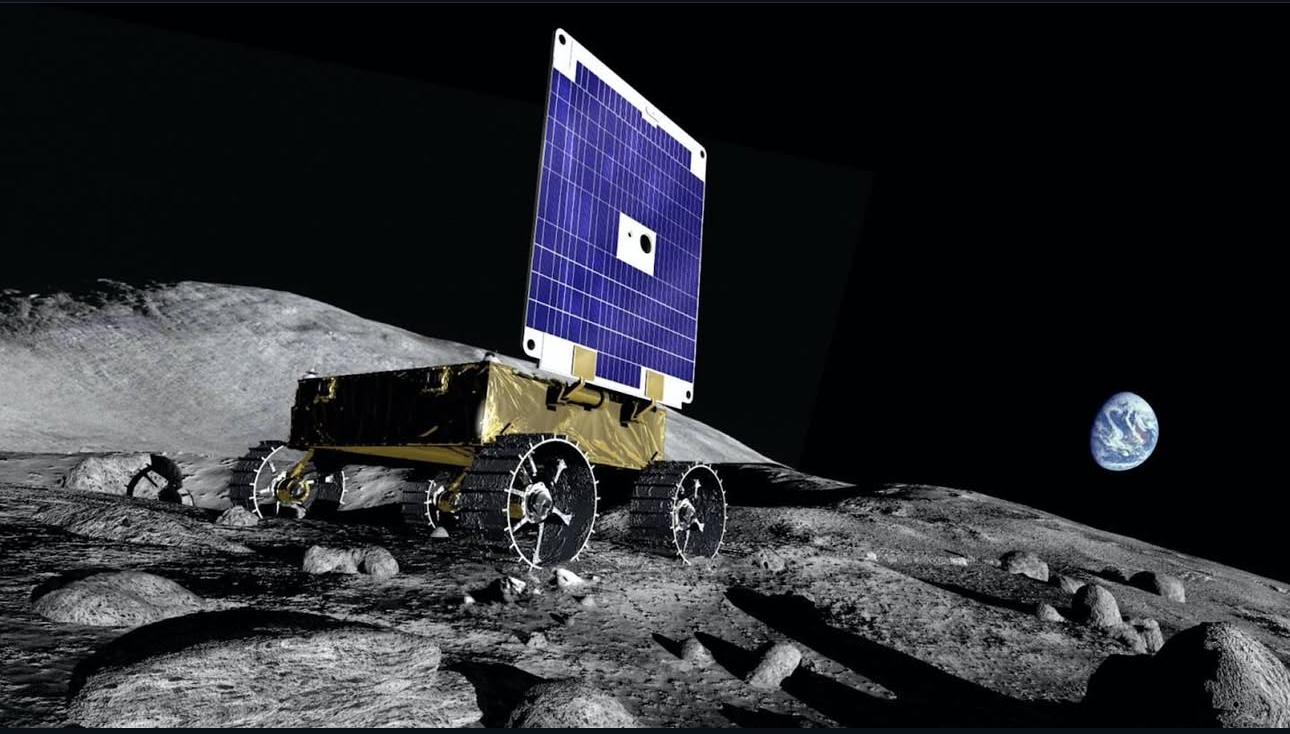
Temporary mechanical design lead for IRIS, the first rover to autonomously search for subsurface water ice at the lunar South Pole. Designed and modeled camera shroud to interface with existing rover chassis. Implemented structural interface redesigns for camera shroud and chassis in SolidWorks, designed and fabricated test fixtures, and performed FEA to verify stiffness and natural frequency targets for mission environments.
Organized 13 qualification experiments for a mission-critical harness on the Spacecraft Mechanical Engineering team. Designed fixturing in Siemens NX, facilitated supplier meetings, and conducted tolerance stack-up analysis.
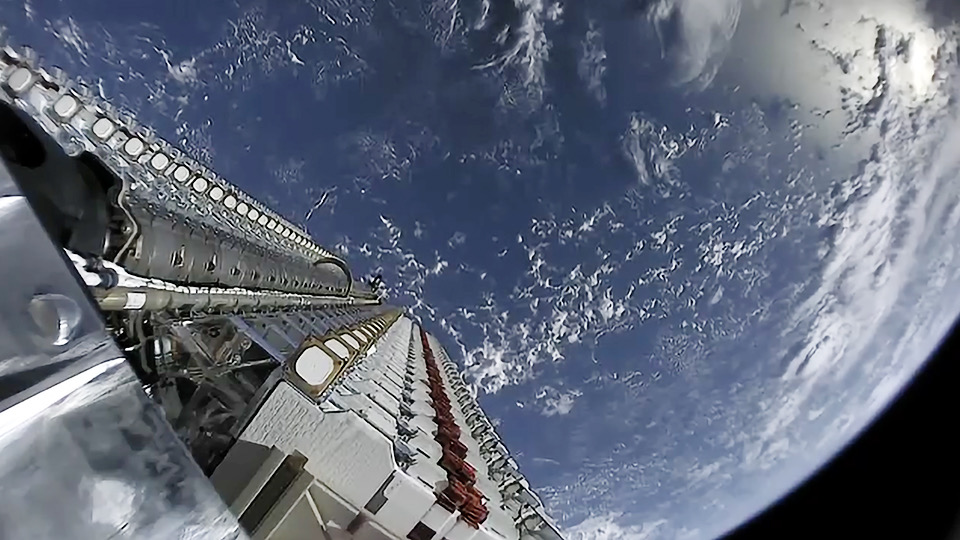
Redesigned flight power and data harnesses for next-gen satellites in Siemens NX. Mapped signaling, calculated power losses and thermal derating, tested harness flexibility in cold temperatures, and reduced harness costs by over $2 million.
Created conops for aft flap installation on S20+ vehicles. Designed planning for hydraulics and propulsion system installation. Developed a pneumatics vibrator prototype for FOD removal during hydraulics flush. Designed laser-cut parts in Siemens NX.
Studied the kinematics and g eometrical parameters of the flying fish pectoral fin actuation system. Applied insights to modular flying fish robot.
Simulated trash-collecting Jackal robot with ROS & iGibson.
Designed crewed Mars mission for 7–14 astronauts — habitat, water recycling, cost analysis. Presented at Johnson Space Center.
Submitted, IEEE International Conference on Intelligent Robots and Systems (IROS) 2026 · arXiv:2603.22560
MESH RCN Meeting 2026
Workshop, IEEE ICRA 2026
Gordon Research Seminar and Conference on Robotics, Ventura, CA, 2026
IEEE International Conference on Robotics and Automation (ICRA), 2025
Carnegie Mellon University
General Electric
Society of Women Engineers
Co-organized the 2nd Unconventional Robots workshop at ICRA 2025 (Atlanta) and the 3rd edition at ICRA 2026 (Vienna). The full-day workshop brings together researchers in novel mechanism design, modeling, simulation, and control of non-standard robotic systems.
Co-founded the Princeton chapter of WoAA (2020–2023), creating a community for women in aerospace engineering at Princeton.
Served as Vice President and Alumni Engagement Chair & Chapter Historian for NSBE Princeton (2020–2022), strengthening alumni networks and chapter engagement.
Rose from Treasurer to Events Chair to Co-President (2020–2022), organizing cultural events, academic programming, and community building for African students.
Student Advisory Board Member for Princeton's CST (2020–2021), advising on science education initiatives and interdisciplinary programming.
Student Co-Organizer for Princeton BTPI (2020–2021), connecting Black students with career opportunities and alumni mentors.
Across robotics, controls, machine learning, aerospace, and mechanical design.

Led end-to-end design and build of a penguin-inspired bipedal robot with six rigid bodies and five Dynamixel-actuated joints. The robot uses prismatic leg extension and ellipsoidal feet with non-concentric curvature centers for passive lateral stability. Developed MuJoCo-based design optimization for body dimensions, implemented open-loop sinusoidal control, and trained PPO for comparison. Achieved 0.165 m/s on low-friction surfaces demonstrating that morphological design improves locomotion robustness. Validated on flat ground, rough terrain, slippery surfaces, and slopes with 3 undergraduate mentees.
Analyzed hip-actuated bipedal walkers across multiple scales to derive allometric scaling laws for robotic locomotion. Created digital twins of 3 robotic systems in Drake and MuJoCo for walking and morphology trade studies. Implemented sinusoidal and PID-based hip control for stable walking across scales, optimizing leg length, foot curvature, mass distribution, and actuation parameters. Analyzed COM motion, stability metrics, torque requirements, and gait performance across scale sweeps. Led design of a 1-meter hip-actuated quasi-passive dynamic walker. Contributing to the Zippy platform, the world's smallest self-contained bipedal robot (3.6 cm) achieving 10 leg-lengths/second.
Implemented Extended Kalman Filter SLAM for simultaneous localization and mapping on a mobile robot in the Webots simulator. Built a full state estimation pipeline including prediction and update steps with landmark association, handling unknown correspondence between observations and map features.
Designed and tuned Linear Quadratic Regulator controllers for optimal trajectory tracking on mobile robot platforms. Derived linearized system dynamics around reference trajectories and computed optimal feedback gain matrices via the discrete algebraic Riccati equation for minimum-cost control in Webots simulation.
Implemented Model Predictive Control for constrained path planning with obstacle avoidance on a mobile robot. Formulated receding-horizon quadratic optimization problems accounting for input constraints, state bounds, and dynamic feasibility, solving at each timestep to generate a control trajectory.
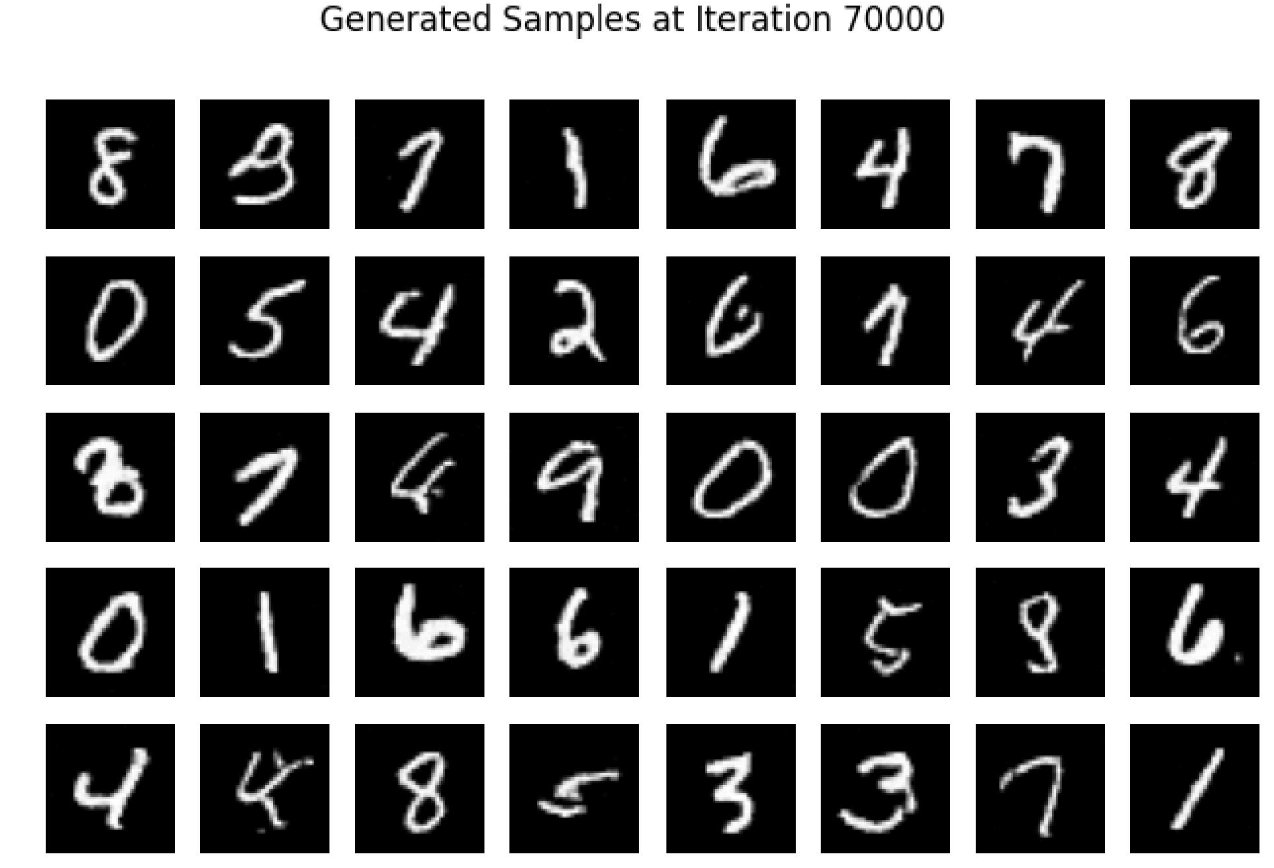
Trained a Generative Adversarial Network from scratch in PyTorch to generate realistic MNIST-style digits. Implemented generator and discriminator architectures with batch normalization and training stabilization techniques. Generated realistic samples by iteration 70,000.
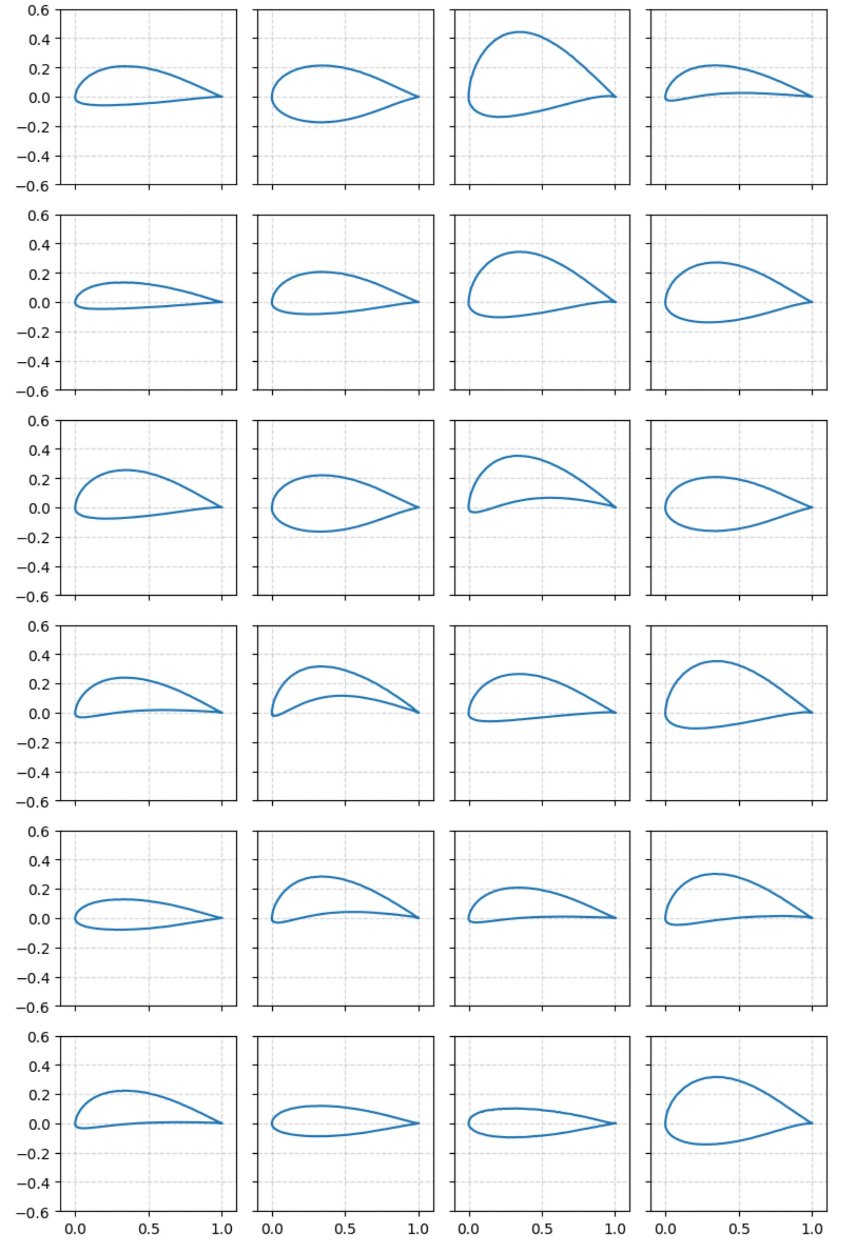
Built a Variational Autoencoder to learn a continuous latent representation of airfoil geometries from an engineering dataset. Sampled from the learned Gaussian distribution to generate novel, physically plausible airfoil profiles for design exploration.
Designed convolutional neural networks for image classification tasks from scratch in PyTorch. Implemented batch normalization, dropout regularization, data augmentation, and residual skip connections to improve generalization.
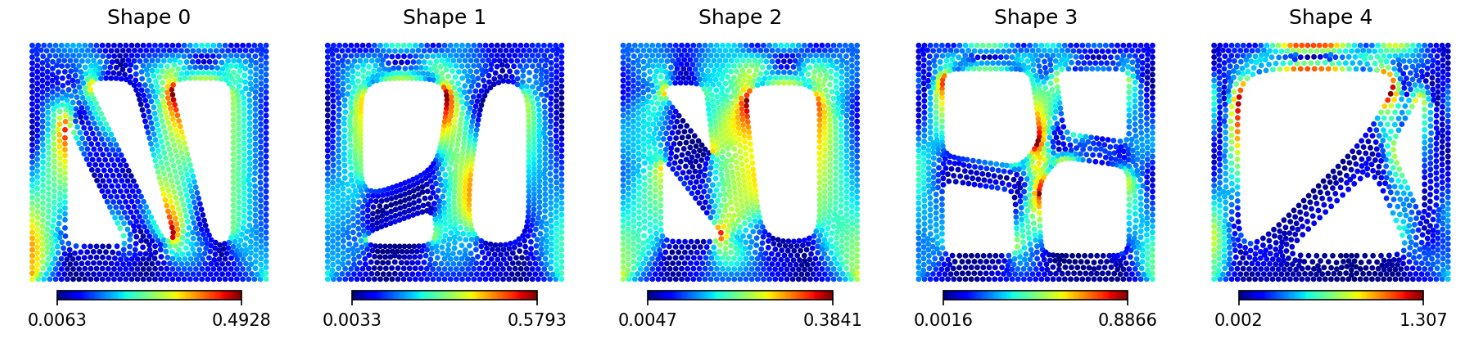
Applied machine learning methods to structural topology optimization problems. Trained models to predict optimal material distributions under various loading conditions, using stress-field visualizations to evaluate structural performance across multiple candidate geometries.
Implemented support vector machines with linear, polynomial, and RBF kernels alongside decision tree classifiers. Compared one-vs-one and one-vs-rest multi-class strategies, analyzing margin size, decision boundaries, and generalization on engineering datasets. Applied PCA for dimensionality reduction, normalization and standardization for feature scaling, log transforms for skewed distributions, and K-means clustering for pattern discovery in high-dimensional engineering datasets with outliers.
Designed a complete space mission trajectory and operations plan for a Lagrange point destination, including orbital transfer calculations, delta-v budgets, and mission timeline.
View →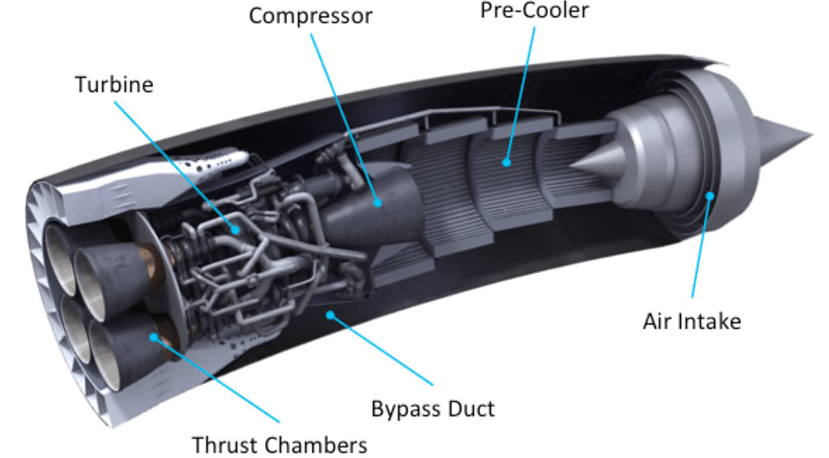
Group project exploring the design and feasibility of a reusable rotating detonation engine for next-generation aerospace propulsion, analyzing thermodynamic cycles and structural requirements.
View →
Designed a crewed Mars trip for 7–14 astronauts alongside NASA scientists and UT Austin faculty. Led habitat design, 3D modeling, cost estimates, water recycling, and the repair & emergency module. Presented findings at NASA Johnson Space Center.
View →Open to conversations about robotics, space, research, or collaboration.